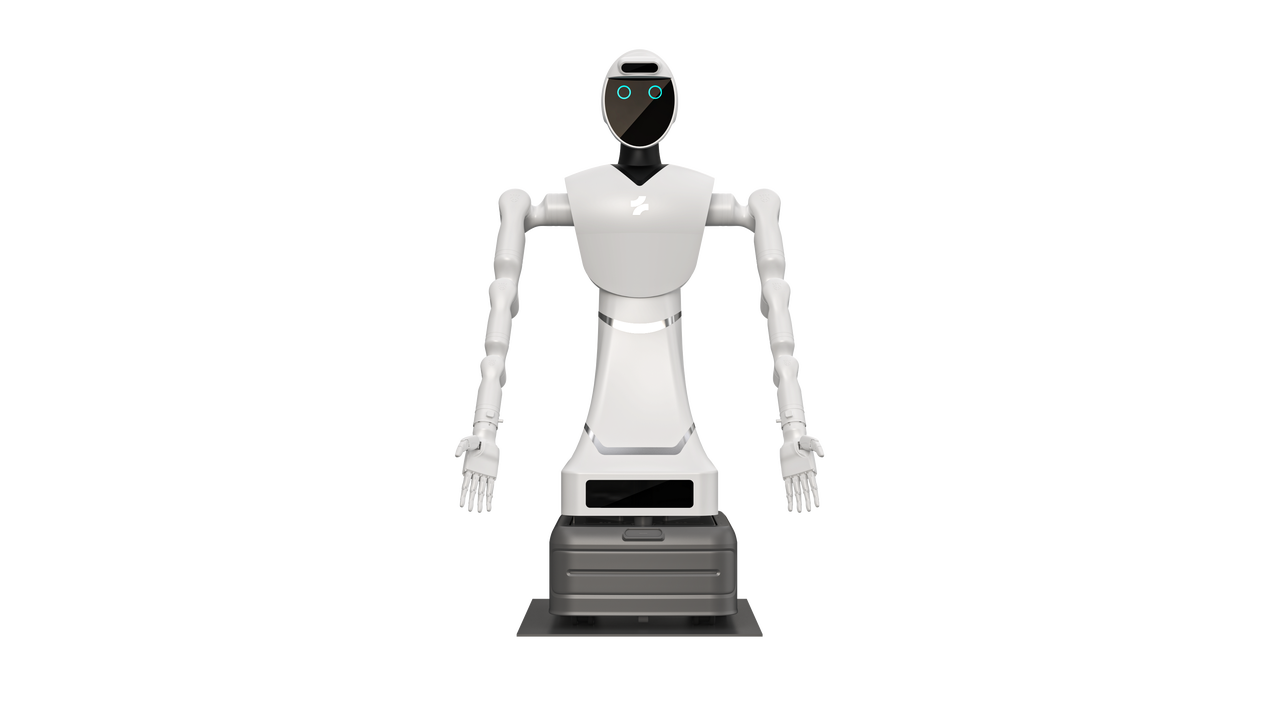
頭部、胸腔、手臂、靈巧手、輪式底盤五大組件構成,全身具有26個自由度,使得機器人能夠實現靈活的運動和姿態控制。 頭部包含深度相機、麥克風陣列、揚聲器等。胸腔包含工控機、交換機等硬件電路。單手臂擁有6個自由度,包括手臂前擺關節、手臂側擺關節、手臂旋轉關節和肘關節。靈巧手是集成小體積大扭矩微型伺服電缸而設計生產的機械靈巧手,該靈巧手集成了 6 個微型伺服電缸,方便用戶進行不同硬度物體的抓取。