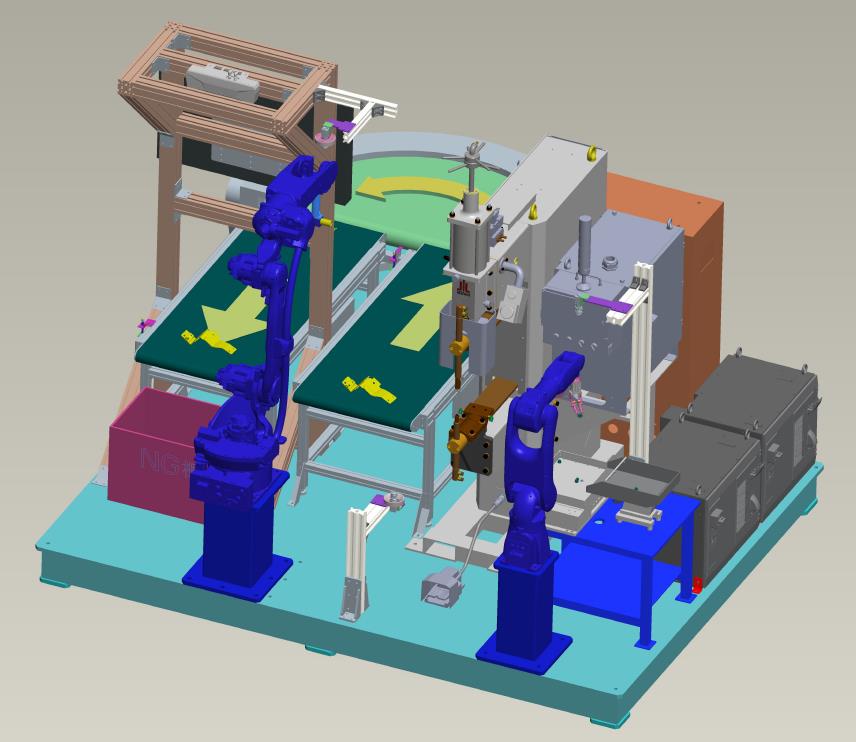
該系統中的機器人GP7利用2D相機對螺母種類與位置進行識別與定位,首次實現多品種螺母在同一臺凸焊機上上柔性化的生產,改變了現有的生產方式,滿足多品種小批量的高自動化與高柔性化生產需求。該系統中另一臺機器人GP12,利用3D視覺系統識別上料輸送線的工件位置與姿態,并利用2D視覺對工件進行2次拍照定位,實現精準定位,提高了生產效率,保證凸焊質量。實現了生產過程的自動化、無人化。